 打印
打印
在国家自然科学基金项目(批准号:T2125009、T2293722)等资助下,浙江大学航空航天学院交叉力学中心杨卫教授、李铁风教授、杨栩旭研究员团队与浙江大学医学院附属邵逸夫医院蔡秀军教授、陈鸣宇医师团队协作,联合多个学科开展交叉研究,阐明了“基于活结的力学传导机制”,并创新性提出“Sliputure”——活结智能缝线,成功将其应用于外科缝合,并有望指导其他机器人和智能结构设计。研究成果以“Slipknot-gauged mechanical transmission and robotic operation”为题,于2025年12月作为封面论文在线发表在国际学术期刊《自然》(Nature)上,论文链接:https://www.nature.com/articles/s41586-025-09673-w。
针对术中所打的经典“外科结”,其本身非常依赖于经验丰富主刀医生的精巧施力。临床上普遍使用的“外科结”是一种死结,用于闭合组织。这种结一旦打牢,便很难调整。因此,拉紧手术结所施加力度的大小,直接影响组织愈合,成为影响手术效果的关键因素。交叉研究团队提出通过活结指导控制缝合打结力的方法,当医生拉紧缝线时,活结的结点被解开瞬间所产生的、一个预设好的精准峰值力,会通过这根缝线实时传送给另一头的死结。活结“牺牲”自己、打开的这一刻,就是告诉系统:“力度已到位,死结请在此刻锁定!” 活结系统的力学机制与逻辑过程为:一、做活结过程中把精准的峰值力信息存在结中;二、解开活结过程则可将力的信息传递给串联的系统中;三、力学模型刻画信息和力的传递并接入机器人或人的操纵系统。这个方法和机制可用于缝线力控以及其他需要力传递的不同尺度和形式结构中。
通过高速摄像和Micro-CT捕捉活结细微的滑动轨迹,通过力学建模、有限元仿真等手段发现了活结蕴藏的有序规律——其打开力与缝线编活结时拉紧结点的力(预紧力)、结环数量、直径、摩擦系数、模量相关。通过反复改进,历经大量设计迭代,完成了这套“基于活结的力学传导机制”的方法,并最终成功将这一力学“密码”稳定地“编织”进外科缝线中,研发出“Sliputure(活结智能缝线)”,实现了“活结”对“死结”的准确调控。比如,针对动物肠道修复手术实验,该方法使得吻合肠道既不渗漏,而又不撕裂。从开放大鼠肠道修复,到腹腔镜下活体猪肠道修复,再到机器人下活体猪肠道修复,该方法都获得了很好效果。此外,通过将视觉反馈接入手术机器人系统,使得该系统一旦检测到活结打开的视觉信号,立即停止器械移动,实现毫秒级响应避免过度拉伸,实现“感知-反馈-制动”的闭环控制。目前,研究团队正在构建针对不同组织的力值数据库,正致力于开发适用于各类机器人手术及消化道、心血管、神经外科等高精度缝合领域的系列产品。这项不依赖复杂电子传感器的创新技术,不仅能满足常规手术中的深腔环境,还有望在其他极端条件(深海、深空、深地等特种作业)和极限尺寸研究(极微观系统构造或调控)中展现出应用前景。
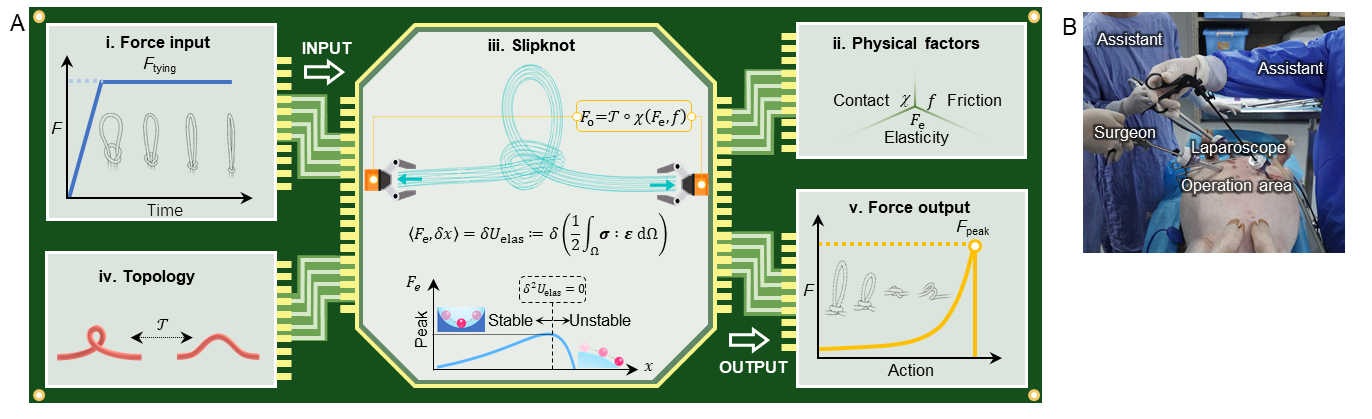
图 活结结构导引力学信息传输与机器人操作。(A)活结结构的力学信息传输机理示意图;(B)通过活结结构的引入控制外科手术缝合力
