


华中科技大学在柔性压力传感领域获最新进展,研究成果以“面向宽量程、高灵敏度压力传感的力电超材料”(Mechanoelectrical metamaterials for broad-range, high-sensitivity pressure sensing)为题,在《科学》(Science)发表。
柔性压电触觉传感器虽在机器人和医疗领域前景广阔,但长期受限于材料性能的矛盾:传统压电陶瓷刚度大、易碎,而柔性聚合物灵敏度低、极化难。更关键的是,传感器的高灵敏度往往意味着窄量程,二者难以兼得。针对这一瓶颈,联合团队创新性地开发出一种由聚合物基体与分子铁电体复合而成的新型压电软材料。该材料不仅具备光固化3D打印特性,且刚度可大范围调控。研究团队进一步提出了“杆板复合双梯度”超结构设计方法,即同时包含结构梯度和材料刚度梯度。这种设计使得传感结构能在小载荷下通过杆的弯曲实现高灵敏度,而在大载荷下自适应切换为板的压缩变形,从而实现高承载能力。实验数据显示,该柔性压电超材料将灵敏度提升至319.5 mV/kPa,探测范围覆盖1.3 Pa至3.45 MPa,跨越多个数量级,实现了高灵敏度与宽量程的共存。
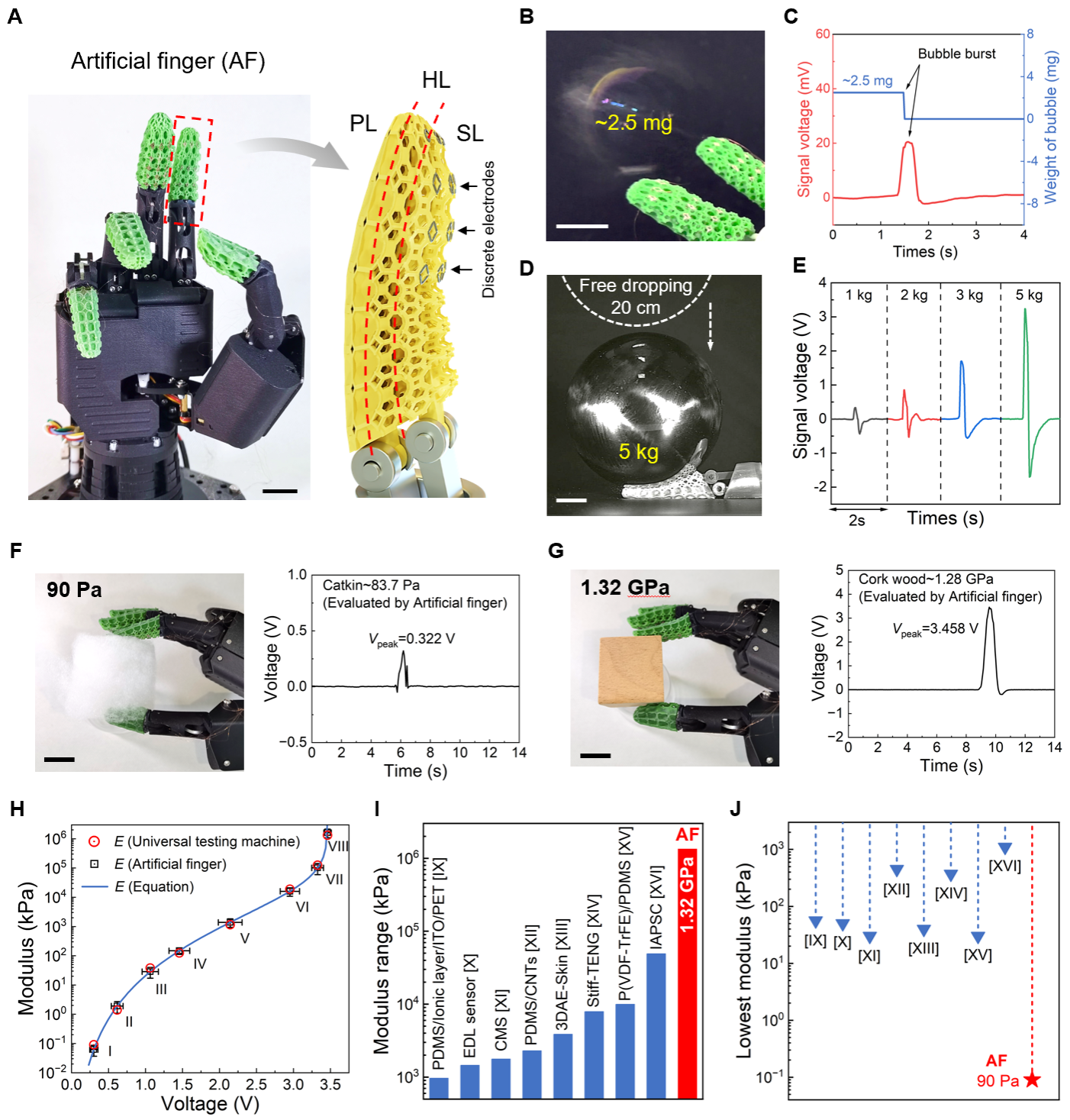
图为压电超材料用于智能机器手指,实现压力感知与模量识别。
在应用验证环节,团队将该材料一体化打印为机器手的手指。该人工手指表现优异:既能感知瓢虫(约20毫克)爬行、肥皂泡(约2.5毫克)着陆与破裂等微弱压力,又能承受5公斤钢球从20厘米高度落下的冲击而不损坏。此外,该手指具备物体模量识别能力,可精准区分柳絮、海绵、木块等不同材质,成功应用于水果、奶酪及鸡蛋等食品的新鲜度与成熟度评估。将材料制成车轮后,还可用于复杂地形的感知与地层模量检测。
该项成果成功解决了柔性传感器领域高灵敏度与宽量程难以兼顾的痛点,为下一代智能机器人触觉系统及便携式健康监测设备的研发提供了重要的理论支撑与技术路径。
论文第一作者为集成电路学院博士生杨非凡和航空航天学院博士生杨浩铭,通讯作者包括集成电路学院张光祖教授和航空航天学院张耀教授。华中科技大学集成电路学院为论文第一完成单位。该研究得到国家自然科学基金等资助。
论文链接:https://www.science.org/doi/10.1126/science.aeb3456